Confidence in agentic AI: Why eval infrastructure must come first
At VentureBeat’s Transform 2025, tech leaders gathered to talk about how they’re transforming their business with agents.Read More
At VentureBeat’s Transform 2025, tech leaders gathered to talk about how they’re transforming their business with agents.Read More
xAI’s gas turbines get official approval from Memphis, Tennessee, even as civil rights groups prepare to sue over alleged Clean Air Act violations.
Researchers at Helmholtz Munich have developed an artificial intelligence model that can simulate human behavior with remarkable accuracy. The language model, called Centaur, was trained on more than ten million decisions from psychological experiments—and makes decisions in ways that closely resemble those of real people. This opens new avenues for understanding human cognition and improving …
Read more “Centaur: AI that thinks like us—and could help explain how we think”
We just released RadialAttention, a sparse attention mechanism with O(nlogn) computational complexity for long video generation. 🔍 Key Features: ✅ Plug-and-play: works with pretrained models like #Wan, #HunyuanVideo, #Mochi ✅ Speeds up both training&inference by 2–4×, without quality loss All you need is a pre-defined static attention mask! ComfyUI integration is in progress and will …
Read more “Radial Attention: O(nlogn) Sparse Attention with Energy Decay for Long Video Generation”
This post covers three main areas: • Why Mixture of Experts is Needed in Transformers • How Mixture of Experts Works • Implementation of MoE in Transformer Models The Mixture of Experts (MoE) concept was first introduced in 1991 by
Interested in leveraging a large language model (LLM) API locally on your machine using Python and not-too-overwhelming tools frameworks? In this step-by-step article, you will set up a local API where you’ll be able to send prompts to an LLM downloaded on your machine and obtain responses back.
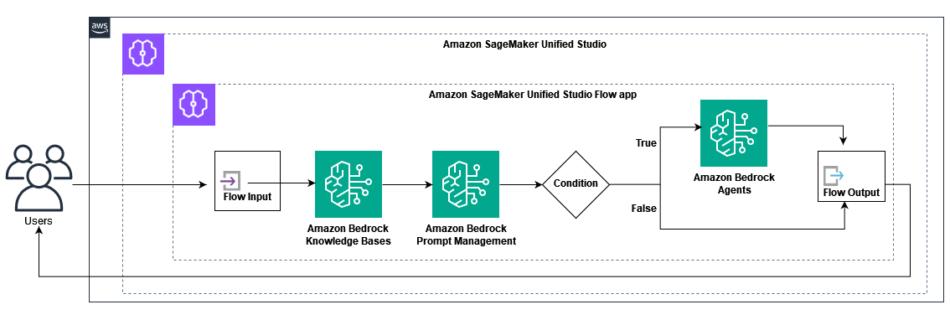
Organizations face the challenge to manage data, multiple artificial intelligence and machine learning (AI/ML) tools, and workflows across different environments, impacting productivity and governance. A unified development environment consolidates data processing, model development, and AI application deployment into a single system. This integration streamlines workflows, enhances collaboration, and accelerates AI solution development from concept to …
Capital One’s head of AI foundations explained at VB Transform on how the bank patterned its AI agents after itself.Read More
Consumer-grade AI tools have supercharged Russian-aligned disinformation as pictures, videos, QR codes, and fake websites have proliferated.
Researchers have demonstrated a new way of attacking artificial intelligence computer vision systems, allowing them to control what the AI “sees.” The research shows that the new technique, called RisingAttacK, is effective at manipulating all of the most widely used AI computer vision systems.